JAXA - Japan's Space Agency
Japanese Space Exploration Systems:
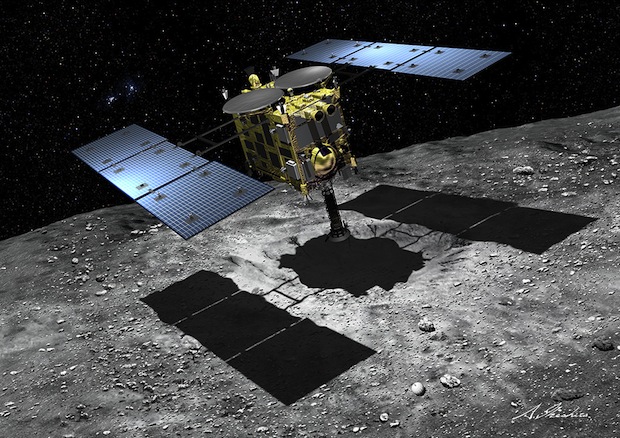
Hayabusa 2
Hayabusa 2 is an Asteroid exploration mission by the Japanese Space Exploration Agency setting out to study Asteroid 1999 JU3, dispatch a series of landers and a penetrator, and acquire sample material for return to Earth. The mission builds on the original Hayabusa mission that launched in 2003 and successfully linked up with asteroid Itokawa in 2005 and returned samples to Earth in 2010 marking the first time sample materials from an asteroid were brought back to Earth.
Hayabusa 2 is planned to complete a mission of six years – launching in December 2014 and traveling through the solar system for three and a half years, arriving at 1999 JU3 in July 2018 to spend 18 months studying the asteroid before making its return to Earth in December 2020.
The Hayabusa 2 spacecraft hosts two remote sensing spectrometers dedicated to studying the energy balance of the asteroid and its surface composition. The primary payload of Hayabusa 2 is a sample collection system that will acquire small amounts of surface samples during brief touchdowns of the main spacecraft on the asteroid's surface using a high-fidelity navigation system that allows the spacecraft to make contact with the surface just long enough to shoot down a projectile that causes an ejection of dust for collection by Hayabusa.
Furthermore, the spacecraft will dispatch four landers – the 10-Kilogram MASCOT lander built in Europe for an in-situ study of surface composition and properties, and three MINERVA landers to deliver imagery and temperature measurements. All landers will make several hops across the asteroid’s surface to take measurements at different locations.
Another payload of the mission is an impactor device that will be deployed towards the asteroid and uses high-explosives to generate a high-speed impact that is hoped to expose material from under the asteroid’s surface for later collection by Hayabusa 2. A deployable camera will be used to document the impact of the penetrator.
After all these ambitious events at the asteroid, Hayabusa 2 will make its way back to Earth to send a Return Capsule on its way to re-enter the atmosphere and bring the collected samples back to Earth for analysis.
Hayabusa 1
Launched on an M-V rocket on May 9, 2003, the 510-Kilogram Hayabusa craft embarked on a long flight to its target which had to be changed multiple times due to delays related to the M-V launch vehicle. One year after launch, Hayabusa swung past Earth to accelerate and make its way out to Itokawa in its 0.95 by 1.7 AU orbit around the sun.
The craft officially arrived at its destination on September 12, 2005 when it reached a distance of 20 Kilometers to the asteroid. In subsequent weeks, the spacecraft descended to 7 and then to 3 Kilometers before beginning a descent to deliver a target marker to test out the vehicle's tracking capabilities. This rehearsal landing was aborted due to problems with the optical navigation system and teams needed to re-group ahead of commanding the vehicle to once again descent from 7.5 Kilometers on November 2.
This second descent was a success and saw the spacecraft reaching 70 meters, verifying the navigation system and delivering a landing marker to validate the vehicle’s target tracking capability. With a landing site selected, the spacecraft approached to 55 meters by November 12 when the small MINERVA lander was released, but failed to reach the surface due to an error in its delivery. On November 19, Hayabusa landed on the asteroid, but teams on the ground were confused since the landing came during a handover of ground stations and by the time communications were regained, the vehicle had moved to 100 Kilometers from the asteroid.
It was later confirmed that the vehicle did make contact with the surface of the asteroid, however, a problem during descent put the craft into safe mode so that the sampling system was not activated at touchdown. Nevertheless, the landing was thought to have delivered some dust particles to the sample container that was subsequently sealed off. On November 25, Hayabusa made its second landing, but again failed to initiate its sampling sequence before having to go into safe mode due to a leak in the propellant system.
Over the next two weeks, teams were fighting to keep the mission alive since the spacecraft was loosing attitude control – its reaction wheels had already failed and the thruster leak caused the vehicle to spin – pointing its solar arrays away from the sun leading to power issues and pointing the communication antennas away from Earth. After attempts to correct the attitude by venting xenon gas through the ion thruster system, contact with the probe was lost on December 8 due to a sudden change in orientation. To stabilize, Hayabusa needed time for the conversion of precession rate to pure rotation which was expected to take several weeks.
Finally, on January 23, 2006, beacon signals from the spacecraft were received and three days later, command capability was restored, allowing teams to instruct the craft to make another xenon ejection which improved the orientation of the craft that re-acquired low-gain communications in late February. By March, medium-gain comm had been re-established and tracking showed the craft 13,000 Kilometers from Itokawa. With two out of four ion engines still up and running and 7 of 11 batteries still being recharged, the spacecraft started its return journey in April 2007.
To get back to Earth, the spacecraft completed two several-month long trajectory maneuvers in 2007 and 2009 into 2010. By March 2010, Hayabusa entered its final trajectory adjustment maneuvers to set up a proper re-entry path for the return capsule which required three trajectory corrections, each several days in duration. By June 5, the spacecraft had achieved a re-entry trajectory over the Woomera Prohibited Area in Australia – a broad strip of uninhabited land suitable for the parachute-assisted landing of the return capsule holding the sample containers.

Three hours prior to entry, the capsule was released from the spacecraft, on a path to hit the atmosphere at 12.2 Kilometers per second. The return capsule made a successful landing while the main spacecraft burned up in the atmosphere. Several hours after landing, the return vehicle was located and recovered to be flown back to Japan to mark the start of the several-month process of opening the sealed sample containers and extracting any particles.
In November 2010, it was announced that about 1,500 particles of extraterrestrial material were found and in the process of being analyzed. It was determined that the composition of Itokawa was similar to that of rocky meteoroids found on Earth confirming its identity as S-type asteroid. Scientists also determined that the dust collected by the spacecraft was exposed to the space environment for about 8 million years, an extremely short time scale in astronomy. This indicated that Itokawa possibly broke apart from a parent asteroid.
Road to Hayabusa 2
With Hayabusa 1 still on its way through the solar system, a possible follow-on mission was proposed in 2006 to closely resemble the original mission featuring a nearly identical spacecraft with only minor changes to respond to issues seen during the Hayabusa mission. With the initial drive to fly the mission as soon as possible teams were hoping to launch in 2010 or 2011, but the budget did not permit a launch then. The additional development time allowed more changes to be made to the original spacecraft design to use more advanced and robust systems and modify the payload suite, also acquiring international support from NASA and a team of the German Aerospace Center and CNES. New systems were added including a Ka-Band antenna and impactor.
In 2012, the project transitioned from a proposal to a development stage when the Critical Design Review green-lighted the assembly of the spacecraft. Integration tests started in 2013 and the spacecraft was fully integrated by the end of that year, on the road to launch in late 2014.
Target Asteroid
Asteroid 1999 JU3 was discovered by the Lincoln Near-Earth Asteroid Research (LINEAR) that has been heavily studied using ground and space-based telescopes. Telescopic data shows that the asteroid is about 920 meters in size and has a rotation period of 7.6 hours. Spectroscopic analysis showed that that asteroid belongs to the C-type class of primitive bodies. Data also suggests that the asteroid, at some point in its life, was in contact with water. JU3 orbits the sun in an orbit of 0.963 by 1.416 Astronomical units, inclined 5.88 degrees. This orbit, stretching from Earth’s orbit out to just outside the orbit of Mars with a small inclination makes the object suitable for a return mission.
Why Asteroids?
Asteroids, like comets, are of particular interest to scientists since they are primitive bodies that can be considered to be the building blocks of the early solar system and hold a record of the birth and initial evolution of the solar system. Larger planets like Earth went through a more complex evolution over which the pristine materials were melted and altered significantly. Due to this change, the materials found on large planets do not hold information into their early stages of formation.
Comets and asteroids, formed early in the evolution of the Solar System, retain a record of when, where and in what conditions they were formed. Exploration of these primitive bodies is essential in gaining insight into the formation of the Solar System. This may also provide clues into the presence and composition of organic molecules in the early solar system and possible mechanisms of their delivery to Earth. Learning about the formation of our own Solar System will also provide valuable information on exoplanets and their formation.
Asteroids can be divided into different classes based on their composition with each group showing different distributions within the asteroid belt between the orbit of Mars and Jupiter, depending on their distance to the sun. While Hayabusa studied and returned sample from an S-type asteroid that are stony in composition, the follow-on mission will explore a C-type asteroid.
S-type asteroids deliver information on the components of rocky planets such as Mars and Earth; they are also the origin of the LL Chondrite, the most common meteoroid found on Earth. The C-type asteroids are believed to hold a significant amount of organics or hydrated minerals and may have played a role in the delivery of organics to Earth. All this information is based on spectroscopic data from telescopic observations as well as analysis of meteoroids found on Earth.
Other asteroid types that can be found farther from the sun are P- and D-type asteroids that are not abundantly found on Earth due to their stable orbits in the outer region of the asteroid belt or as Jovian Trojans. It is desired that a possible Hayabusa 2 follow-on mission would study one of these types of bodies to get a full picture of the composition of the different primitive bodies.
Hayabusa 2 Spacecraft
The Hayabusa 2 spacecraft is similar in architecture to the first Hayabusa spacecraft with a number of notable changes, not only to the instrument and payload suite, but also to the spacecraft platform itself. These changes include the addition of a reaction wheel to create a redundant configuration, the addition of a Ka-Band communications system and changes to the Ion Engine System using more robust technology. Components kept from the original mission allow teams to rely on flight-proven technology that has shown to perform well over the course of a mission lasting over half a decade.
The Hayabusa 2 spacecraft consists of a spacecraft platform 1.6 by 1.0 by 1.2 meters in size using composite materials and aluminum alloy for a structural framework and internal and external panels providing mounting surfaces for the various spacecraft systems and payloads. The vehicle has a dry mass of 490 Kilograms and is capable of holding nearly 100 Kilograms of propellants. With its solar arrays deployed, Hayabusa 2 has a span of six meters.
Electrical & Thermal Systems
Power generation is provided by two deployable solar arrays, each consisting of three square panels suspended on two booms that interface with the center panel and the upper deck of the spacecraft platform. With a total surface area of 12 square meters, the arrays are expected to deliver 2,600 Watts of electrical power when the spacecraft is 1 Astronomical Unit from the sun, decreasing to about 1,400 Watts when the vehicle is at 1.4 AU, the aphelion distance of the asteroid. Power is stored in a 13.2 Amp-hour Lithium Ion Battery. Power is distributed to the various satellite systems using a 50-Volt power bus with power being distributed by Series Switching Regulators that provide battery control and bus protection.
The spacecraft includes a cold re-start feature. In the event of a loss of all power, the vehicle can automatically re-start once power generation resumes in order to protect for a loss on sun-pointing attitude or other unforeseen events that can lead to a spacecraft shutdown.
Spacecraft thermal control is accomplished using a combination of passive thermal control featuring blankets and multilayer insulation and active thermal control using thermally conductive coldplate assemblies, heat pipes and radiators installed on the cold side of the spacecraft. Heaters are used to maintain operating temperatures of electronics equipment when needed.
Attitude Determination & Control

Hayabusa 2 uses a number of Attitude Determination and Control Systems and a combination of electrical and chemical propulsion. Attitude Determination is provided by two star trackers, two Inertial Measurement Units, four accelerometers and four Coarse Sun Sensors. The Attitude and Orbit Control Unit serves as the brains of the various sensors and actuators – being capable of autonomously maintaining a pre-programmed distance to the asteroid using data from the navigation sensors that also include optical systems and it also controls all descent events to ensure a soft landing and successful ascent. The system uses an extended Kalman filter that outputs the position and relative velocity that are processed using an orbit dynamics tool and a basic gravity field model of the asteroid. The primary attitude sensors are two star trackers which acquire imagery of the sky that is analyzed by a software algorithm that compares the acquired star pattern with a catalog to precisely determine the spacecraft's orientation in space.
Each star tracker has a field of view of around 8 x 8 degrees and uses a CCD detector operating at 1Hz. Hayabusa 2 maintains its attitude through the use of four reaction wheels that allow control of the vehicle about all three axes. The reaction wheel assembly is a rotating inertial mass that is driven by a brushless DC motor that spins the wheel. When accelerating the wheel, the satellite body to which the wheels are directly attached will rotate to the opposite direction as a result of the introduced counter torque.The original Hayabusa spacecraft had only three reaction wheels that were also capable of controlling the orientation on all axes, but did not have any redundancy. Early in the mission, one of the wheels failed followed by another later in the flight, requiring Hayabusa to rely on its engines to maintain its attitude. The addition of a fourth wheel ensures that the system can tolerate the failure of one of the wheels without losing any attitude
The four Coarse Sun Sensors are installed on different sides of the spacecraft and are capable of detecting the direction of the solar vector with some accuracy in order to be able to point the solar arrays to the sun in case of a spacecraft safe mode.
Two redundant Inertial Reference Units are used to augment attitude determination and for use to measure body rates in order to stabilize the spacecraft rates so that the star trackers can acquire star patterns which requires the spacecraft to dampen body rates to a certain level. The accelerometers provide insight into the operation of the propulsion system, allowing the precise tracking of the achieved changes in velocity supplied by the Ion Engine System that will be in operation for several thousand hours over the course of the six year mission.
Propulsion Systems
Like its predecessor, Hayabusa 2 combines a chemical and electrical propulsion system. The spacecraft hosts a bi-propellant chemical propulsion system using Monomethylhydrazine fuel and Nitrogen Tetroxide oxidizer, stored in propellant tanks that are pressurized with high-pressure gas to operate a total of 12 pressure-fed thrusters.
The 12 engines are operated as part of two strings that can be isolated in case of leaks or other problems. The ISAS-20N thrusters deliver a nominal thrust of 20 Newtons at a specific impulse of 290 seconds featuring a film-coating for thruster cooling.
The engines are capable of operating in pulse mode for spacecraft attitude control and in steady-state mode for Cruise Maneuvers and other translational burns. The thrusters also provide de-saturation of the reaction wheels – spinning the wheels down while countering the resulting force with the engines.
Hayabusa 2 will achieve the vast majority of the required change in velocity to travel to and from the asteroid by using its Ion Engine System – IES. Ion thrusters generate thrust by accelerating ions through the use of an electric field and ejecting these ions at extremely high velocity creating thrust force propelling the spacecraft forward. Although ion thrusters deliver a very low thrust, they are extremely efficient and consume only a very small amount of propellant. Through long operation of the thrusters, spacecraft can achieve changes in velocity of several Kilometers per second as demonstrated by Hayabusa 1 (over 2km/s), Deep Space 1 (4.3km/s), and Dawn (over 10km/s).
Ion thrusters use ions to create thrust in accordance with momentum conservation. The method of ion acceleration varies between the use of Coulomb and Lorentz force, but all designs take advantage of the charge/mass ratio of the ions to create very high velocities with very small potential differences which leads to a reduction of reaction mass that is required but also increases the amount of specific power compared to chemical propulsion.
The thrusters operate by releasing small amounts of Xenon atoms that are then ionized through electron bombardment by using electron cyclotron resonance microwave discharge – a new design that eliminated solid electrodes and associated heaters that were used as part of previous systems. The same microwave generator is used to feed the ion generator and neutralizer which reduces overall mass of the assembly. The neutralizer emits electrons near the exiting ion beam to ensure that equal amounts of positive and negative charge are expelled, thus preventing the spacecraft from gaining an excessive electrical charge that could damage components.
The generated ions are extracted by a dedicated system consisting of electrically charged carbon-carbon grids with primary acceleration of the ions taking place between the first and second acceleration grids. The negative voltage of the accelerator prevents ions from the beam plasma outside the thrusters from streaming back which would decrease the generated thrust. The ejected ions push the spacecraft in the opposite direction according to Newton’s third law.
Hayabusa 2 uses four ion thrusters installed on a single panel of the spacecraft, facing the same direction to be able to combine thrust. Three units are in simultaneous operation, allowing the fourth system to come into play in the event one of the active thrusters fails.
The system is fed from a 51-liter xenon tank that can hold about 73 Kilograms of the gas. Each of the thrusters generates an operational thrust of nearly 10 mN at a specific impulse of 2,800 seconds. During operation, the system needs 250 to 1,200 Watts of electrical power. The entire Ion Thruster Assembly weighs about 70 Kilogram and the thrusters can be gimbaled by +/-5 degrees using an electromechanical system.
Improvements made to the propulsion system from Hayabusa 1 to 2 include a 25% increase in thrust and added mechanisms to prevent plasma ignition malfunctions in the ion source. The neutralizer, that had shown degradation after the first 10,000 hours of operation, was improved by protecting the outer walls from plasma and by strengthening the magnetic field to decrease the applied voltage needed for the emission of electrons. Hayabusa 2’s ion thrusters are planned to operate for over 18,000 hours.
Data Handling & Communications
The Hayabusa 2 spacecraft is controlled by a Central Data Handling Unit that interfaces with all spacecraft systems and is capable of auto-commanding spacecraft functions, execute commands sent from Earth, handle all payload and systems data, and deliver housekeeping and stored instrument data to the communications system of the spacecraft. The Data Handling Unit is based on a COSMO 16 Central Processing Unit and is connected to the Peripheral Interface Modules of the various spacecraft systems using a high-speed data bus. Collected data is stored in a 1GB data recorder.
X- and Ka-Band Antenna
The communications subsystem of the Hayabusa 2 spacecraft is similar to that of Hayabusa 1 with the notable addition of a second High Gain Antenna as part of a Ka-Band communications system. Originally, Hayabusa flew with a large parabolic X-Band High Gain Antenna that took up most of the space on the upper deck of the spacecraft. Improvements in communication technology allows Hayabusa 2 to use two planar High Gain Antennas that are considerably smaller and have a lower mass while maintaining the same capabilities and communications characteristics. Having two high gain communication systems adds redundancy and also expands the vehicle’s overall capabilities in terms of downlink volume. The X-Band system will be used for day-to-day operations, that is, telemetry downlink and command uplink to the spacecraft. The Ka-Band system is primarily used for the downlink of science data, taking advantage of its higher downlink rate of 32kbit/s. The Ka-Band system also allows for a more precise DDOR (Delta-Differential One-way Ranging) that will complement the normal line-of-sight ranging and doppler measurements for improved navigation during the mission.
The two High-Gain Antennas have a very narrow boresight, requiring the spacecraft to point to Earth to enable communications at up to 32kbit/s. A single two-axis gimbaled X-Band Medium Gain Antenna with an 18-degree cone is used for telemetry downlink and command uplink at lower data rates up to 256bit/s when the HGAs are not pointing to Earth. In case the HGA and MGA can not see Earth, Hayabusa 2 will rely on three omni-directional Low Gain Antennas that provide beacon signal and basic telemetry and command uplink capability at 8bit/s.
Optical Navigation Systems
In addition to its absolute navigation instruments, Hayabusa 2 includes three Optical Navigation Cameras, a LIDAR, five Target Markers and a Flash Lamp to be used during proximity operations at the asteroid, the release of the landers and rover and the descent and touchdown of the main spacecraft.The three Optical Navigation Cameras are known as ONC-W1 and W2 (Wide-angle cameras) and ONC-T (telescopic camera). The ONC-W1 and ONC-T cameras reside on the nadir-facing panel of the spacecraft, looking straight down at the surface, while the W2 camera is installed on the –x panel to provide a slant view. All three cameras use two-dimensional CCD detectors, 1024 by 1024 pixels in size with pixel sizes of 12 micrometers. The detectors are sensitive in a wavelength range between 350 and 1,060 nanometers, covering the visible and near-infrared wavelengths. The cameras use a common electronics unit that employs a RISC processor and gate-array image processing technology providing image compression, center-finding, bright object detection, correlation tracking, terrain extraction and others needed for optical navigation.The wide-angle cameras each have a field of view of 54 by 54 degrees achieving a resolution of 7 meters per pixel at a distance of 7 Kilometers to the asteroid. ONC-T has a narrow field of view of 5.8 by 5.7 degrees with a ground resolution of one meter from a distance of 7 Kilometers. The telescopic camera has a focal length of 121 millimeters and an aperture diameter of 15 millimeters. It includes a filter wheel containing a magnifying lens, six medium-band band filters with a bandpass of 15 nanometers at 390, 480, 550, 700, 860 and 950 nm, and a single sodium narrow band filter at 590nm with a 10nm bandpass. It takes 4.7 seconds to rotate the wheel from filter to filter. Using its different filters, ONC-T will be used for multi-band spectroscopy. ONC-T will support exposure times of 5.44 milliseconds to 178 seconds with an additional <1 microsecond exposure for streak elimination.The cameras will be used during the cruise phase to acquire imagery of bright stars as well as the Earth Moon system for camera calibration.
ONC Camera Placement on Spacecraft
Even at a large distance, the cameras will already be used to monitor the target asteroid for light curve and spectral observation and searching for a possible satellite of 1999 JU3. At the Home Point of 20km, the cameras are used for imaging the entire surface at a resolution of 2m/pixel using ONC-T that will also yield global spectroscopic observations. In the low-altitude phase, observations will be performed from 5, 1 and 0.1 Kilometers for detailed surveying of local areas in order to find suitable landing sites and a good location for the deployment of the impactor. During lander deployments, the W2 camera will take images of the departing vehicle followed by W1 for descent and trajectory monitoring. After landing, the small vehicles will be located with ONC-T from one Kilometer in altitude.
ONC-T & Bandpass Filters
During the descent for touchdown, the ONC cameras will be the primary navigation instrument from altitudes between 50 and 5 meters.Imagery acquired by ONC will be used for morphological studies of the asteroid, the determination of asteroid volume for bulk density estimation, crater distribution to assess the age of the asteroid and to identify fresh soil locations, and studies of the artificially generated crater. Spectroscopic analysis involving ONC-T will provide information on the spectroscopic characteristics of the different surface features. This analysis will deliver data on basic composition of the surface, degree of hydration of surface materials and the presence of a sodium exosphere that could deliver data on the asteroid’s heating history which is considered an important piece of information by geologists.
LIDAR Laser Source
Hayabusa 2 is outfitted with a LIDAR unit that will be used for navigation when the craft is in proximity to the asteroid, scientific studies of the surface, and a technical demonstration for future optical communications systems. The LIDAR unit measures 24 by 24 by 23 centimeters in size and weighs 3.7 Kilograms comprised of a laser source and an optical head with telescope. LIDAR stands for Light Detection and Ranging and uses laser pulses that are reflected off a target to determine that target’s distance from the spacecraft.The system pulses its 1,064nm infrared laser source at an energy of 10mJ per 10 nanosecond pulse, up to one pulse per second. The laser generates a beam with a divergence of 1.7 mrad, creating a footprint on the surface of about 20 meters from the 20-Kilometer home point. The laser light that is reflected by the asteroid is detected by using a Cassegrain telescope with a primary concave mirror and a secondary convex mirror aligned about the optical axis. The aperture of the telescope is 127 millimeters in diameter and the optics focus the light into a silicon-avalanche photodiode through a narrow-band filter only allowing the desired wavelength to reach the detector. All optical components are installed on a stable optical bench. The LIDAR system will operate at a time resolution better than 3.3 nanoseconds allowing the system to determine the vehicle’s range with an accuracy of +/-5 meters from an altitude of 25 Kilometers, although it is expected that the system will acquire 1999 JU3 from a distance of 50 Kilometers. LIDAR data is provided to the spacecraft computer and the Attitude and Propulsion System to allow the spacecraft to autonomously maintain its planned altitude. When reaching 30 meters, a second set of optics will be employed for measurements up to +/-1 meter accuracy. In addition to delivering valuable navigation data, the LIDAR will record the integrated intensity of each pulse as well as the associated received energy which will yield accurate measurements of surface albedo including that of shadowed areas. Furthermore, the system will provide topographical data.
In a Dust-Count Mode, LIDAR will detect the intensity of scattered light caused by dust in the vicinity of the asteroid. The instrument can not detect the abundance of dust particles, but will show the presence of dust over a certain threshold.
To serve as a demonstrator for future deep-space optical communications, LIDAR will be used around the time of the Earth flyby one year into the mission when a laser pulse will be sent from Earth to be received by LIDAR that will immediately return a pulse to the ground station to demonstrate a basic link experiment. The ground station to be used is NICT Koganei, using a 1.2J laser operating at a pulse repetition rate of 10 Hz. Hayabusa's Laser Range Finder comes into play late in the descent phase, consisting of four laser sources canted 30 degrees. It is activated at around 35 meters in altitude to deliver four oblique range measurements that are used by the attitude control system to keep the spacecraft pointed to the local vertical – ensuring that the bottom panel remains aligned with the local surface during the final meters of descent that are driven by the asteroid’s weak gravitational force. A fifth laser range finder is pointed at the sampling horn for the detection of contact signaled by motion of the sampling horn. Hayabusa carries a series of five Target Markers that are released towards a landing site to provide a tracking target for the vehicle’s navigation instruments. These spherical, bean-bag type target markers are installed on the underside of the spacecraft to be released at an altitude of about 40 meters when the craft is approaching its landing site.

After releasing the marker, the spacecraft slows down to allow the marker to fall away from it and make contact well before the spacecraft. Once at an altitude of 17 meters, the spacecraft reduces its velocity to zero and enters a free-falling descent. At that point, the target marker is already on the surface and ready to be used for navigation. During final descent, the Optical Navigation Cameras W1 & T1 on the nadir-facing panel operate a Flash Light that is activated every two seconds and imagery is acquired with the light on and off to allow the onboard software to subtract the two images from one another to determine the position of the target marker. This technique is used to identify any horizontal velocity that has to be eliminated by the spacecraft in order to achieve a safe landing, otherwise an abort would occur. Another optical navigation method is tracking of bright pixel groups to estimate horizontal velocity. A final optical part of the landing navigation system are four Fan Beam Sensors that are installed on the solar panels of the spacecraft. Each side features one transmitter and receiver that create a three-dimensional detection area under the solar panels to detect any obstacles that could endanger the spacecraft during landing which would trigger an automated abort.


")





































 !!!
!!!