Manticore
RETIRED MOD

- Joined
- Jan 18, 2009
- Messages
- 10,115
- Reaction score
- 114
- Country

- Location
ACTICS 101: ANTI-SUBMARINE WARFARE (ASW): PART 1 - THE FUNDAMENTALS
In Part 1 of this discussion, we'll address the fundamentals of naval oceanography, i.e. the nature of the subsurface environment and how it impacts on anti-submarine warfare (ASW).
A. FEAR GOD, DREADNOUGHT, AND THE SUBMARINE!
The watchword of subsurface warfare, and by extension, anti-submarine warfare (ASW), is stealth. Submarines are absolutely dependent on stealth for both mission effectiveness and self-defense.
The introduction of submarines brought about a new and revolutionary dimension in naval warfare, one that was measurable in fathoms. Compared to the heavily armored ironclads, dreadnoughts, battleships, and battlecruisers that ruled the surface, directly confronting each other in hails of gunfire, a submerged submarine instantly became invisible, allowing it closely approach the most powerful surface ship. It could then deliver a torpedo, a weapon which could avoid the armor and strike below the waterline, where a ship was most vulnerable, thus allowing the smallest submarine to sink the largest ship.
This unique combination of stealth and offensive punch has therefore been the defining characteristic of the submarine from the very beginning.
British Admiral Sir John Fisher, the father of the the first big gun battleship, HMS Dreadnought, had the prescience to know that the submarine would seriously constrain surface ship operations, so much so that during WWI, the Grand Fleet did not operate in the southern part of the North Sea because of the threat posed by U-boats. Fisher had hoped to develop a blue water force projection capability that would combine the surface strike firepower of the battlecruiser with the submarine, making both the open ocean and the narrows untenable for the enemy. He envisioned that that the future of naval warfare lay in the ability to move quickly and strike at long range, as well as to go below the surface. Unfortunately for the Allies, Fisher's vision proved to be ahead of its time.
The goal of modern ASW has remained unchanged from the time that the effectiveness of submarine warfare was first demonstrated during WWI. That goal is to deny an adversary submarine the ability to exercise its considerable influence on military objectives throughout an area of interest.
ASW no longer involves destroyers and corvettes racing around, pounding the ocean with active sonar and dumping seemingly endless numbers of depth charges on the heads of hapless and terrified submariners. (Though, admittedly, popping the movie Das Boot into the DVD player is still a favorite pastime).

Image credit: Das Boot, 1981, Columbia Pictures et al.
Rather, in the modern era, passive sonar is the instrument of choice (on both sides of the equation) when it comes to trying to detect and locate an enemy, and active sonar is usually relegated to the final attack and other special circumstances. Therefore, since passive sonar is so critically important, both surface ships and submarines take every effort to reduce their acoustic signatures.
Despite their stealth, submarines are inherently quite vulnerable, and they are easiest to detect when they poke their masts (or their hulls) through the surface. In an encounter between a surface ship and a submerged submarine, however, the advantage most definitely shifts to the submarine, as it tends to have a quieter acoustic signature.
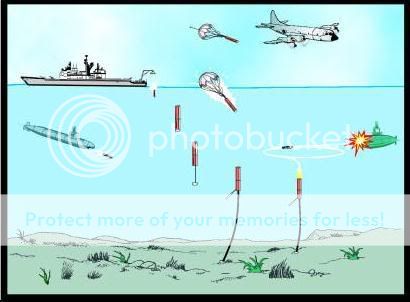
This advantage diminishes significantly, however, when the surface ship can act in concert with other friendly assets, especially aircraft. In fact, aircraft are perhaps the most effective way of countering submarines.
More on that later, but firstly, let's examine the environment in which submarines operate.
B. NAVAL OCEANOGRAPHY
1. The basics of SONAR
When the first sonar (sound navigation and ranging) systems were developed (the ASDIC system) between the world wars, it was believed that submarines would henceforth be stripped of their stealth. As was made obvious during the Battle of the Atlantic in World War II, this was hardly the case.
Sonar exploits underwater sound propagation to navigate, communicate, or as a means of acoustic location. There are two kinds of sonar: active and passive.
Active Sonar
Active sonar requires a transmitter to create a sound pulse (the famous "ping") and a receiver, to "listen" for the reflection (the echo) of that sound pulse.
"Give me a ping, Vasili. One ping only, please."
For snarf.
With active sonar, the source of the sound is the sonar system itself, the transducer (which converts electrical energy into acoustic energy). You also need a receiver to catch the signal (echo) reflected back from the target. That signal is degraded with increasing distance to the target in exponential fashion, so that four times the power of the active sonar produces only about twice the range.
A modern hull mounted active sonar can produce hundreds of thousands of watts of sound energy, reaching up to around 250 decibels (dB). Compare that to the sound level of a jet engine at 30 meters distance, which is just 150 dB!
Passive Sonar
With passive sonar, the sound source is the target itself. A transducer that can only receive acoustic energy is called a hydrophone.
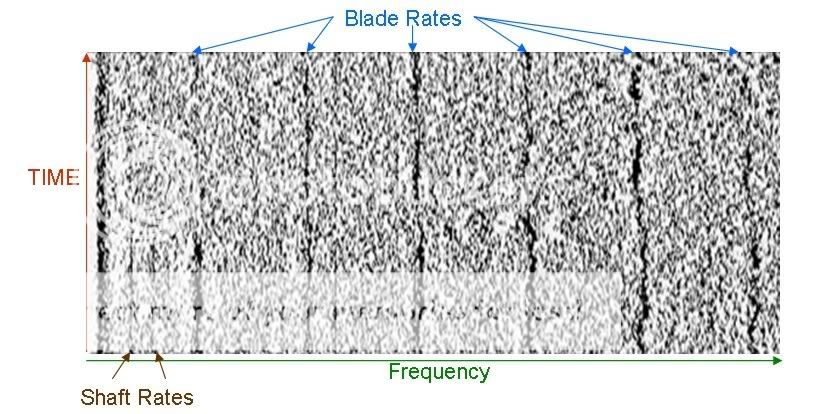
Passive sources fall into two main categories: broadband and narrowband.
Broadband sources produce acoustic energy over a wide range of frequencies. When it comes to ships and submarines, typical broadband sources are noises that emanate from the propeller or shaft, flow noise, and some kinds of propulsion systems (e.g. steam boilers).
Narrowband sources, on the other hand, produce acoustic energy within a small band or class of frequencies. Typical ship and submarine sources are the various pieces of machinery found in every ship. For example, pumps, motors, electrical generation equipment and propulsion systems. When specifying narrowband sources, it is important to also specify the frequency at which it occurs.
Each type of sonar is dependent on a different characteristic of the sonar target that in turn influence sonar performance. For active sonar, that characteristic is the target's sound reflection characteristics, or "target strength". For passive sonar, the target's own radiated noise is critical.
Frequency
Lower frequency (longer wavelength) sounds - generally in the 1-5 kHz range - tend to propagate the furthest distance, and require a large sonar dome to maintain gain (directionality). Medium frequency sonars fall generally into the 5-15 kHz band, and high frequency in the 20-30 kHz range.
High frequency (shorter wavelength) sonar can be broadly associated with short, direct path ranges in the surface layer (again, more to follow). Medium frequency sonars can be used to detect targets below the surface layer, and can sometimes exploit the bottom bounce technique. Low frequency sonars, meanwhile, have the potential to achieve convergence zone (CZ) detections. More to come on the terms direct path, surface layer, and bottom bounce.
It is also very important to note, however, that in recent years, the distinctions between frequency classifications and capabilities (as well as the boundaries of the frequencies being achieved) have blurred somewhat as technology has pushed the boundaries of what sonar can do. It is also important to realize that the ocean environment (including such variables as temperature, salinity, depth, and even geographic location) plays a huge role in affecting how sonar behaves, and notably, what it can and cannot do.
2. The Characteristics of Sound in the Ocean Environment
While light is highly absorbed by water, sound waves are not. Sound waves can thus be effectively used to probe the ocean's depths, communicate underwater, and most importantly for the purposes of this discussion, locate submerged objects.
It is notable that although sound travels vastly farther through water than does light, it is lost in reverse order, i.e. highest frequency sounds are absorbed first, and lowest frequency sounds last. This frequency loss is also one reason why it can take quite awhile to determine the nature of, or develop, a sonar contact. It requires analysis of many sounds of many different frequencies, coming from different sources on the target, to determine its identity.
The speed that sound travels underwater varies from about 4,750 feet per second (fps) to about 5,150 fps. Its speed increases with:
1. Temperature, at a rate of about 4.3 fps per degree Fahrenheit.
2. Salinity, at a rate of about 4.3 fps per thousandth part increase in salinity.
3. Depth, at a rate of about 1 fps per 60 feet of depth.
The speed of sound underwater (in fps) can be determined as follows: 4388 + (11.25 × temperature (in degrees Fahrenheit)) + (0.0182 × depth (in feet)) + salinity (in parts per thousand)
(A special instrument, called a sound velocimeter, can be used to measure the sound velocity profile of a certain area of the ocean).
The average salinity of the world's oceans is 35 parts per thousand (ppt), that is to say, the same as 35 grams of salt dissolved in each kilogram of water. Salinity in the oceans varies from about 32-37 ppt, except in the polar regions and near the shore (where fresh water from ice and the flow from rivers and streams act to dilute the salinity), where it may be less than 30 ppt.
Weather will also influence salinity, particularly where precipitation exceeds evaporation (such as in the rainy North Pacific) or where evaporation exceeds precipitation (such as in the Indian Ocean). An isolated body of water also tends to have higher salinity, such as in the Mediterranean, where excess evaporation works to increase salinity.
The polar seas (the Arctic and Antarctic) are the least saline (at 30-33 ppt), followed by the Indian Ocean (32-35 ppt), the Pacific (32-36 ppt), and lastly, the most saline ocean is the Atlantic (at 34-37 ppt).
Water pressure, which increases with depth, also has an effect on the propagation of sound. As stated, the speed of sound underwater increases with greater depth (i.e. increased pressure), which causes sound waves to bend (or refract) away from the area of higher sound speed. More on the effect of refraction in just a bit.
Let's look more closely at one of the most significant factors affecting underwater acoustics: temperature.
3. The Thermocline or the Layer
The world's oceans are stratified vertically with respect to temperature. Considered globally, seawater has a relatively large temperature range that depends upon location and time of year. Water temperature in the open ocean varies from a low of 28.4 degrees Fahrenheit (-2 degrees Celsius) to about 86 degrees F (30 degrees C), and can reach nearly 100 degrees F (37.8 degrees C) in shallow coastal waters around the Equator.
The thermal structure of the ocean is divided into three zones:
First is the surface layer or the mixed zone, where temperatures are almost uniform with depth. This is where waters are mixed together by wave action, solar driven circulation cells, tides, and so on. The depth of the surface layer varies with location and season. During winter months, it becomes more defined at all latitudes, and may extend to depths of 1,000 feet or more in mid latitudes during stormy weather. In the polar regions, water can become thoroughly mixed in winter, so that it is very nearly the same temperature from the surface to the bottom. Under normal conditions, the daily temperature of the surface layer varies as little as 5 degrees.
The bottom of the surface layer or mixed zone is marked by the next zone, the thermocline, where the temperature begins to decrease rapidly with depth.
The third zone is the deep layer, where temperature decreases very slowly with depth.
Ocean layers

Image credit: ES310, Introduction to Naval Weapons Engineering.
Here we are most concerned with the characteristics (i.e. acoustic properties) of the thermocline.
There may be a number of seasonal thermoclines present, which vary in depth and numberin accordance with the season (being most numerous and extending to the the deepest depths during the summertime), and also, standing or permanent thermoclines which appear year around and usually occupy deeper waters than do the seasonal kind. (Thermoclines may be identified on a bathythermograph trace, abbreviated BT or XBT, which is a graph that measures temperature as a function of depth, with temperature normally on the horizontal axis, and depth on the vertical axis).
Distinct density boundaries appear at the various thermoclines that change the water's acoustic properties. Within the surface layer, sound travels generally in straight lines (particularly at angles of less than 15 and more than 45 degrees relative to the horizontal from the source).
The "layer"

Image credit: ES310, Introduction to Naval Weapons Engineering.
However, sound tends to bend (i.e. refraction) as it passes through the thermoclines and tends to produce "shadow zones" above and below the angle of the sound. The boundaries of these shadow zones are referred to as limiting rays. As a result, much of the sound generated by surface sources is trapped in the mixed layer and can travel over substantial distances (sometimes called the "surface duct").
Surface duct

Image credit: ES310, Introduction to Naval Weapons Engineering.
There are exceptions to this effect, a good example being in the Red Sea, where hot water seeping from thermal vents pool and accumulate at the bottom, and another example, in the polar seas, where extremely cold surface water is present. These produce reverse thermoclines with temperatures that increase with depth (rather than the usual behavior of decreasing with depth).
Unsurprisingly, submariners pay close attention to keeping an eye on where the thermoclines are located, and may pass across these boundaries periodically to listen for targets above and below the layer.
Submarines enjoy an additional beneficial effect, in that sound generated below the surface duct may often only be detected in the mixed layer within a 45 degree cone from the source. Surface vessels, and sonobouys dropped by aircraft, get around this obstacle by using variable depth sonars (VDS) and hydrophones. The detection gear is suspended below the layer to detect sounds under it.
4. Convergence Zones (CZ)
Convergence zones (CZ) are another effect caused by the refraction of underwater sound and are chiefly a result of changes in sound speed velocity as depth increases.
Sound waves traveling down into the depths (past the critical depth, where velocity matches that at the source) tends to bend or refract back toward the surface due to the increased pressure (and hence, increased sound velocity). Under the right conditions, the refraction creates parabolically arcing paths through the water, and when it reaches the surface, in a donut shaped area called an annulus, the sound is reflected back down again. Each focus at the surface is called a convergence zone (CZ). The process repeats itself until the sound waves have been attenuated or obstructed.
Convergence zone

mage: ES310, Introduction to Naval Weapons Engineering.
CZ require a minimum depth of about 400 meters in order to form, at which depth they have about a 50 percent chance of developing. The likelihood of CZ forming tends to increase with water depth, so a depth of 600 meters yields an 80 percent probability of CZ, with near certainty in even deeper water. In shallow water, the sound waves echo off the bottom rather than refract upwards. Notably, underwater topography, such as sea mounts and mid oceanic ridges, tend to disrupt CZ paths, as do ocean currents that have significant differences in temperature (e.g. the Gulf Stream).
CZ typically develop at about 30-33 nautical mile (nm) intervals, with the width of the annulus increasing with distance. The first CZ at 30-33 nm typically has a surface annulus some 3-5 nm wide; the second, at 60-66 nm, is about 6 nm wide; and the third, at 90-99 nm, has a width of about 9 nm. Fourth and fifth CZ are possible but rare. Notably, CZ ranges in the Mediterranean are reduced due to layers of warm water near the bottom.
Annulus
Image credit: ES310, Introduction to Naval Weapons Engineering.
In Part 1 of this discussion, we'll address the fundamentals of naval oceanography, i.e. the nature of the subsurface environment and how it impacts on anti-submarine warfare (ASW).
A. FEAR GOD, DREADNOUGHT, AND THE SUBMARINE!
The watchword of subsurface warfare, and by extension, anti-submarine warfare (ASW), is stealth. Submarines are absolutely dependent on stealth for both mission effectiveness and self-defense.
The introduction of submarines brought about a new and revolutionary dimension in naval warfare, one that was measurable in fathoms. Compared to the heavily armored ironclads, dreadnoughts, battleships, and battlecruisers that ruled the surface, directly confronting each other in hails of gunfire, a submerged submarine instantly became invisible, allowing it closely approach the most powerful surface ship. It could then deliver a torpedo, a weapon which could avoid the armor and strike below the waterline, where a ship was most vulnerable, thus allowing the smallest submarine to sink the largest ship.
This unique combination of stealth and offensive punch has therefore been the defining characteristic of the submarine from the very beginning.
British Admiral Sir John Fisher, the father of the the first big gun battleship, HMS Dreadnought, had the prescience to know that the submarine would seriously constrain surface ship operations, so much so that during WWI, the Grand Fleet did not operate in the southern part of the North Sea because of the threat posed by U-boats. Fisher had hoped to develop a blue water force projection capability that would combine the surface strike firepower of the battlecruiser with the submarine, making both the open ocean and the narrows untenable for the enemy. He envisioned that that the future of naval warfare lay in the ability to move quickly and strike at long range, as well as to go below the surface. Unfortunately for the Allies, Fisher's vision proved to be ahead of its time.
The goal of modern ASW has remained unchanged from the time that the effectiveness of submarine warfare was first demonstrated during WWI. That goal is to deny an adversary submarine the ability to exercise its considerable influence on military objectives throughout an area of interest.
ASW no longer involves destroyers and corvettes racing around, pounding the ocean with active sonar and dumping seemingly endless numbers of depth charges on the heads of hapless and terrified submariners. (Though, admittedly, popping the movie Das Boot into the DVD player is still a favorite pastime).
Image credit: Das Boot, 1981, Columbia Pictures et al.
Rather, in the modern era, passive sonar is the instrument of choice (on both sides of the equation) when it comes to trying to detect and locate an enemy, and active sonar is usually relegated to the final attack and other special circumstances. Therefore, since passive sonar is so critically important, both surface ships and submarines take every effort to reduce their acoustic signatures.
Despite their stealth, submarines are inherently quite vulnerable, and they are easiest to detect when they poke their masts (or their hulls) through the surface. In an encounter between a surface ship and a submerged submarine, however, the advantage most definitely shifts to the submarine, as it tends to have a quieter acoustic signature.
This advantage diminishes significantly, however, when the surface ship can act in concert with other friendly assets, especially aircraft. In fact, aircraft are perhaps the most effective way of countering submarines.
More on that later, but firstly, let's examine the environment in which submarines operate.
B. NAVAL OCEANOGRAPHY
1. The basics of SONAR
When the first sonar (sound navigation and ranging) systems were developed (the ASDIC system) between the world wars, it was believed that submarines would henceforth be stripped of their stealth. As was made obvious during the Battle of the Atlantic in World War II, this was hardly the case.
Sonar exploits underwater sound propagation to navigate, communicate, or as a means of acoustic location. There are two kinds of sonar: active and passive.
Active Sonar
Active sonar requires a transmitter to create a sound pulse (the famous "ping") and a receiver, to "listen" for the reflection (the echo) of that sound pulse.
"Give me a ping, Vasili. One ping only, please."
For snarf.
With active sonar, the source of the sound is the sonar system itself, the transducer (which converts electrical energy into acoustic energy). You also need a receiver to catch the signal (echo) reflected back from the target. That signal is degraded with increasing distance to the target in exponential fashion, so that four times the power of the active sonar produces only about twice the range.
A modern hull mounted active sonar can produce hundreds of thousands of watts of sound energy, reaching up to around 250 decibels (dB). Compare that to the sound level of a jet engine at 30 meters distance, which is just 150 dB!
Passive Sonar
With passive sonar, the sound source is the target itself. A transducer that can only receive acoustic energy is called a hydrophone.
Passive sources fall into two main categories: broadband and narrowband.
Broadband sources produce acoustic energy over a wide range of frequencies. When it comes to ships and submarines, typical broadband sources are noises that emanate from the propeller or shaft, flow noise, and some kinds of propulsion systems (e.g. steam boilers).
Narrowband sources, on the other hand, produce acoustic energy within a small band or class of frequencies. Typical ship and submarine sources are the various pieces of machinery found in every ship. For example, pumps, motors, electrical generation equipment and propulsion systems. When specifying narrowband sources, it is important to also specify the frequency at which it occurs.
Each type of sonar is dependent on a different characteristic of the sonar target that in turn influence sonar performance. For active sonar, that characteristic is the target's sound reflection characteristics, or "target strength". For passive sonar, the target's own radiated noise is critical.
Frequency
Lower frequency (longer wavelength) sounds - generally in the 1-5 kHz range - tend to propagate the furthest distance, and require a large sonar dome to maintain gain (directionality). Medium frequency sonars fall generally into the 5-15 kHz band, and high frequency in the 20-30 kHz range.
High frequency (shorter wavelength) sonar can be broadly associated with short, direct path ranges in the surface layer (again, more to follow). Medium frequency sonars can be used to detect targets below the surface layer, and can sometimes exploit the bottom bounce technique. Low frequency sonars, meanwhile, have the potential to achieve convergence zone (CZ) detections. More to come on the terms direct path, surface layer, and bottom bounce.
It is also very important to note, however, that in recent years, the distinctions between frequency classifications and capabilities (as well as the boundaries of the frequencies being achieved) have blurred somewhat as technology has pushed the boundaries of what sonar can do. It is also important to realize that the ocean environment (including such variables as temperature, salinity, depth, and even geographic location) plays a huge role in affecting how sonar behaves, and notably, what it can and cannot do.
2. The Characteristics of Sound in the Ocean Environment
While light is highly absorbed by water, sound waves are not. Sound waves can thus be effectively used to probe the ocean's depths, communicate underwater, and most importantly for the purposes of this discussion, locate submerged objects.
It is notable that although sound travels vastly farther through water than does light, it is lost in reverse order, i.e. highest frequency sounds are absorbed first, and lowest frequency sounds last. This frequency loss is also one reason why it can take quite awhile to determine the nature of, or develop, a sonar contact. It requires analysis of many sounds of many different frequencies, coming from different sources on the target, to determine its identity.
The speed that sound travels underwater varies from about 4,750 feet per second (fps) to about 5,150 fps. Its speed increases with:
1. Temperature, at a rate of about 4.3 fps per degree Fahrenheit.
2. Salinity, at a rate of about 4.3 fps per thousandth part increase in salinity.
3. Depth, at a rate of about 1 fps per 60 feet of depth.
The speed of sound underwater (in fps) can be determined as follows: 4388 + (11.25 × temperature (in degrees Fahrenheit)) + (0.0182 × depth (in feet)) + salinity (in parts per thousand)
(A special instrument, called a sound velocimeter, can be used to measure the sound velocity profile of a certain area of the ocean).
The average salinity of the world's oceans is 35 parts per thousand (ppt), that is to say, the same as 35 grams of salt dissolved in each kilogram of water. Salinity in the oceans varies from about 32-37 ppt, except in the polar regions and near the shore (where fresh water from ice and the flow from rivers and streams act to dilute the salinity), where it may be less than 30 ppt.
Weather will also influence salinity, particularly where precipitation exceeds evaporation (such as in the rainy North Pacific) or where evaporation exceeds precipitation (such as in the Indian Ocean). An isolated body of water also tends to have higher salinity, such as in the Mediterranean, where excess evaporation works to increase salinity.
The polar seas (the Arctic and Antarctic) are the least saline (at 30-33 ppt), followed by the Indian Ocean (32-35 ppt), the Pacific (32-36 ppt), and lastly, the most saline ocean is the Atlantic (at 34-37 ppt).
Water pressure, which increases with depth, also has an effect on the propagation of sound. As stated, the speed of sound underwater increases with greater depth (i.e. increased pressure), which causes sound waves to bend (or refract) away from the area of higher sound speed. More on the effect of refraction in just a bit.
Let's look more closely at one of the most significant factors affecting underwater acoustics: temperature.
3. The Thermocline or the Layer
The world's oceans are stratified vertically with respect to temperature. Considered globally, seawater has a relatively large temperature range that depends upon location and time of year. Water temperature in the open ocean varies from a low of 28.4 degrees Fahrenheit (-2 degrees Celsius) to about 86 degrees F (30 degrees C), and can reach nearly 100 degrees F (37.8 degrees C) in shallow coastal waters around the Equator.
The thermal structure of the ocean is divided into three zones:
First is the surface layer or the mixed zone, where temperatures are almost uniform with depth. This is where waters are mixed together by wave action, solar driven circulation cells, tides, and so on. The depth of the surface layer varies with location and season. During winter months, it becomes more defined at all latitudes, and may extend to depths of 1,000 feet or more in mid latitudes during stormy weather. In the polar regions, water can become thoroughly mixed in winter, so that it is very nearly the same temperature from the surface to the bottom. Under normal conditions, the daily temperature of the surface layer varies as little as 5 degrees.
The bottom of the surface layer or mixed zone is marked by the next zone, the thermocline, where the temperature begins to decrease rapidly with depth.
The third zone is the deep layer, where temperature decreases very slowly with depth.
Ocean layers
Image credit: ES310, Introduction to Naval Weapons Engineering.
Here we are most concerned with the characteristics (i.e. acoustic properties) of the thermocline.
There may be a number of seasonal thermoclines present, which vary in depth and numberin accordance with the season (being most numerous and extending to the the deepest depths during the summertime), and also, standing or permanent thermoclines which appear year around and usually occupy deeper waters than do the seasonal kind. (Thermoclines may be identified on a bathythermograph trace, abbreviated BT or XBT, which is a graph that measures temperature as a function of depth, with temperature normally on the horizontal axis, and depth on the vertical axis).
Distinct density boundaries appear at the various thermoclines that change the water's acoustic properties. Within the surface layer, sound travels generally in straight lines (particularly at angles of less than 15 and more than 45 degrees relative to the horizontal from the source).
The "layer"
Image credit: ES310, Introduction to Naval Weapons Engineering.
However, sound tends to bend (i.e. refraction) as it passes through the thermoclines and tends to produce "shadow zones" above and below the angle of the sound. The boundaries of these shadow zones are referred to as limiting rays. As a result, much of the sound generated by surface sources is trapped in the mixed layer and can travel over substantial distances (sometimes called the "surface duct").
Surface duct
Image credit: ES310, Introduction to Naval Weapons Engineering.
There are exceptions to this effect, a good example being in the Red Sea, where hot water seeping from thermal vents pool and accumulate at the bottom, and another example, in the polar seas, where extremely cold surface water is present. These produce reverse thermoclines with temperatures that increase with depth (rather than the usual behavior of decreasing with depth).
Unsurprisingly, submariners pay close attention to keeping an eye on where the thermoclines are located, and may pass across these boundaries periodically to listen for targets above and below the layer.
Submarines enjoy an additional beneficial effect, in that sound generated below the surface duct may often only be detected in the mixed layer within a 45 degree cone from the source. Surface vessels, and sonobouys dropped by aircraft, get around this obstacle by using variable depth sonars (VDS) and hydrophones. The detection gear is suspended below the layer to detect sounds under it.
4. Convergence Zones (CZ)
Convergence zones (CZ) are another effect caused by the refraction of underwater sound and are chiefly a result of changes in sound speed velocity as depth increases.
Sound waves traveling down into the depths (past the critical depth, where velocity matches that at the source) tends to bend or refract back toward the surface due to the increased pressure (and hence, increased sound velocity). Under the right conditions, the refraction creates parabolically arcing paths through the water, and when it reaches the surface, in a donut shaped area called an annulus, the sound is reflected back down again. Each focus at the surface is called a convergence zone (CZ). The process repeats itself until the sound waves have been attenuated or obstructed.
Convergence zone
mage: ES310, Introduction to Naval Weapons Engineering.
CZ require a minimum depth of about 400 meters in order to form, at which depth they have about a 50 percent chance of developing. The likelihood of CZ forming tends to increase with water depth, so a depth of 600 meters yields an 80 percent probability of CZ, with near certainty in even deeper water. In shallow water, the sound waves echo off the bottom rather than refract upwards. Notably, underwater topography, such as sea mounts and mid oceanic ridges, tend to disrupt CZ paths, as do ocean currents that have significant differences in temperature (e.g. the Gulf Stream).
CZ typically develop at about 30-33 nautical mile (nm) intervals, with the width of the annulus increasing with distance. The first CZ at 30-33 nm typically has a surface annulus some 3-5 nm wide; the second, at 60-66 nm, is about 6 nm wide; and the third, at 90-99 nm, has a width of about 9 nm. Fourth and fifth CZ are possible but rare. Notably, CZ ranges in the Mediterranean are reduced due to layers of warm water near the bottom.
Annulus
Image credit: ES310, Introduction to Naval Weapons Engineering.





 ), but in the case of anti-submarine warfare (ASW), it has perhaps changed just a little.
), but in the case of anti-submarine warfare (ASW), it has perhaps changed just a little.