Manticore
RETIRED MOD

- Joined
- Jan 18, 2009
- Messages
- 10,115
- Reaction score
- 114
- Country

- Location
AUV Systems Order for Saab
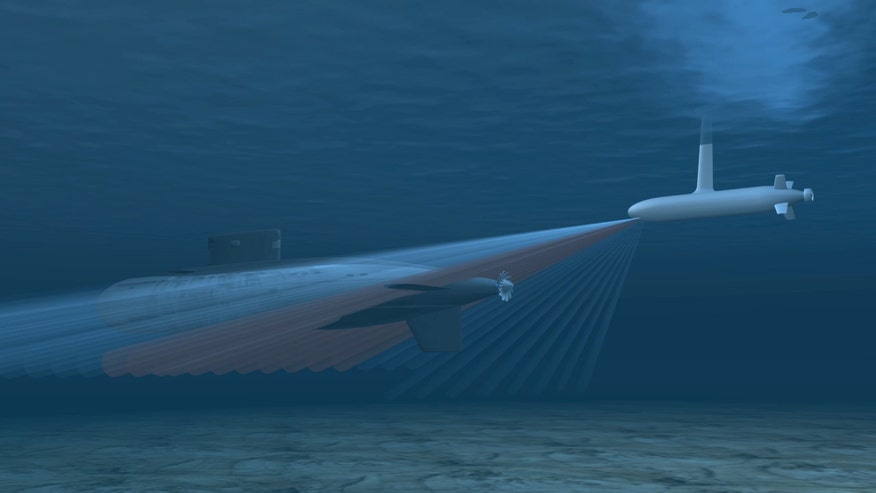
Defence & security company Saab sign contract for delivery of its AUV62 Autonomous Underwater Vehicle (AUV) systems in training configuration.
The AUV62 is an advanced and highly modern and capable system for cost-efficient training of a navy’s ASW forces. The AUV62 is an artificial acoustic target that mimics a submarine in a way that is compatible with any torpedo- and sonar system on the market today. The AUV62 system fully replaces the use of a submarine in the role as a manoeuvring training target. With the AUV62 Saab offers a state-of-the-art training capability for demanding customers investing in the future.
The order, from an undisclosed customer, has a total value of MSEK 269 and comprises supply and long term maintenance and support of AUV62, the latest version of the advanced training target for Anti Submarine Warfare (ASW) training.
System deliveries will take place during 2014 and 2015, followed by long term maintenance and support of the systems.
“We are very proud of the confidence our customers place in the AUV62 system and are satisfied to have been able to secure this order for the system.” says Görgen Johansson, Senior Vice President and Head of Business Area Dynamics, Saab.

AUV Systems Order for Saab
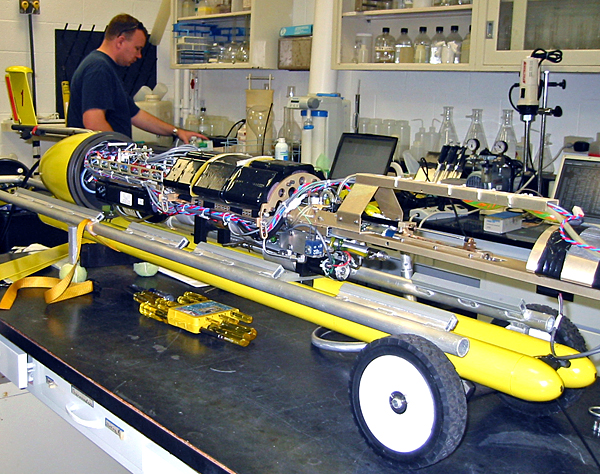
U.S. Navy Buys Another REMUS 100 UUV
U.S. Navy undersea warfare experts are buying another REMUS 100 unmanned underwater vehicle (UUV) from Hydroid Inc. in Pocasset, Mass., a wholly owned subsidiary of Kongsberg Maritime AS in Kongsberg, Norway.
The Naval Undersea Warfare Center (NUWC) in Newport, R.I., needs the Hydroid REMUS 100 for continued development and testing, supplementing NUWC’s existing inventory of REMUS systems acquired previously to support a variety of program efforts, NUWC officials say.
The NUWC is The Navy’s primary research and engineering center for underwater and submarine warfare.
REMUS is short for Remote Environmental Measuring Unit S. The REMUS 100 slightly longer than five feet, is 7.5 inches in diameter, and weighs 85 pounds. It can operate to depths of 328 feet on missions lasting eight to 10 hours.
Powering the REMUS 100 UUV is a direct-drive DC brushless motor and an open three-bladed propeller. It can swim as fast as 4.5 knots and navigates by Doppler-assisted dead reckoning, Inertial navigation system, and GPS.
Operators control the REMUS 100 UUV with laptop computer-based software for programming, training, post-mission analysis, documentation, maintenance, and troubleshooting. The software enables one operator to control as many as four REMUS 100 UUVs at the same time.
The REMUS 100 is suited to marine research, defense, hydrographic and offshore energy applications. It is small enough to be carried by two people, and can perform intricate sonar and oceanographic surveys over large areas, Hydroid officials say.
Typical REMUS 100 applications include mine countermeasures, harbor security, debris field mapping, search and salvage operations, hydrographic surveys, environmental monitoring, fishery operations, and scientific sampling and mapping, Hydroid officials say.
NUWC is buying the REMUS 100 UUV sole source because Hydroid is the only known source that can meet Navy requirements of a UUV that is man-portable, has an energy density of at least 1.2 kilowatt hours, Navy officials say.
Researchers plan to use the REMUS 100 in exercises that require a UUV that can move as fast as four knots for as long as 10 hours. NUWC officials plan to release a formal request for quote (RFQ) to Hydroid around 1 May.


Subsea World News - U.S. Navy Buys Another REMUS 100 UUV
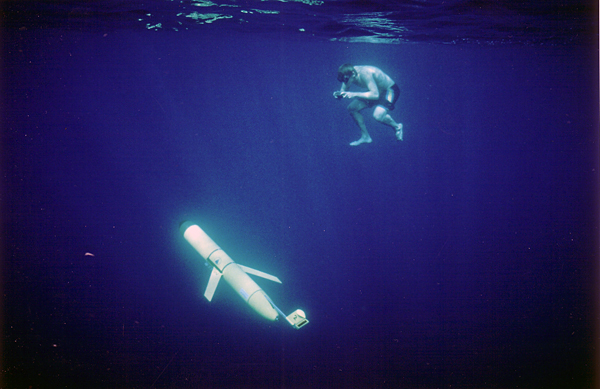
Slocum Glider
Conceived by Douglas C. Webb and supported by Henry Stommel and others, the class of Slocum Gliders is named after Joshua Slocum, the first man to single-handedly sail around the world.
The Slocum Glider is a uniquely mobile network component capable of moving to specific locations and depths and occupying controlled spatial and temporal grids. Driven in a sawtooth vertical profile by variable buoyancy, the glider moves both horizontally and vertically.
The long-range and duration capabilities of Slocum gliders make them ideally suited for subsurface sampling at the regional scale. Carrying a wide variety of sensors, they can be programmed to patrol for weeks at a time, surfacing to transmit their data to shore while downloading new instructions at regular intervals, realizing a substantial cost savings compared to traditional surface ships.

The small relative cost and the ability to operate multiple vehicles with minimal personnel and infrastructure will enable small fleets of gliders to study and map the dynamic (temporal and spatial) features of subsurface coastal waters around the clock and around the calendar.
Webb Research Corporation - designs and manufacturers scientific instruments for oceanographic research and monitoring
http://www.webbresearch.com/pdf/Slocum_Glider_Data_Sheet.pdf
Defence & security company Saab sign contract for delivery of its AUV62 Autonomous Underwater Vehicle (AUV) systems in training configuration.
The AUV62 is an advanced and highly modern and capable system for cost-efficient training of a navy’s ASW forces. The AUV62 is an artificial acoustic target that mimics a submarine in a way that is compatible with any torpedo- and sonar system on the market today. The AUV62 system fully replaces the use of a submarine in the role as a manoeuvring training target. With the AUV62 Saab offers a state-of-the-art training capability for demanding customers investing in the future.
The order, from an undisclosed customer, has a total value of MSEK 269 and comprises supply and long term maintenance and support of AUV62, the latest version of the advanced training target for Anti Submarine Warfare (ASW) training.
System deliveries will take place during 2014 and 2015, followed by long term maintenance and support of the systems.
“We are very proud of the confidence our customers place in the AUV62 system and are satisfied to have been able to secure this order for the system.” says Görgen Johansson, Senior Vice President and Head of Business Area Dynamics, Saab.
AUV Systems Order for Saab
U.S. Navy Buys Another REMUS 100 UUV
U.S. Navy undersea warfare experts are buying another REMUS 100 unmanned underwater vehicle (UUV) from Hydroid Inc. in Pocasset, Mass., a wholly owned subsidiary of Kongsberg Maritime AS in Kongsberg, Norway.
The Naval Undersea Warfare Center (NUWC) in Newport, R.I., needs the Hydroid REMUS 100 for continued development and testing, supplementing NUWC’s existing inventory of REMUS systems acquired previously to support a variety of program efforts, NUWC officials say.
The NUWC is The Navy’s primary research and engineering center for underwater and submarine warfare.
REMUS is short for Remote Environmental Measuring Unit S. The REMUS 100 slightly longer than five feet, is 7.5 inches in diameter, and weighs 85 pounds. It can operate to depths of 328 feet on missions lasting eight to 10 hours.
Powering the REMUS 100 UUV is a direct-drive DC brushless motor and an open three-bladed propeller. It can swim as fast as 4.5 knots and navigates by Doppler-assisted dead reckoning, Inertial navigation system, and GPS.
Operators control the REMUS 100 UUV with laptop computer-based software for programming, training, post-mission analysis, documentation, maintenance, and troubleshooting. The software enables one operator to control as many as four REMUS 100 UUVs at the same time.
The REMUS 100 is suited to marine research, defense, hydrographic and offshore energy applications. It is small enough to be carried by two people, and can perform intricate sonar and oceanographic surveys over large areas, Hydroid officials say.
Typical REMUS 100 applications include mine countermeasures, harbor security, debris field mapping, search and salvage operations, hydrographic surveys, environmental monitoring, fishery operations, and scientific sampling and mapping, Hydroid officials say.
NUWC is buying the REMUS 100 UUV sole source because Hydroid is the only known source that can meet Navy requirements of a UUV that is man-portable, has an energy density of at least 1.2 kilowatt hours, Navy officials say.
Researchers plan to use the REMUS 100 in exercises that require a UUV that can move as fast as four knots for as long as 10 hours. NUWC officials plan to release a formal request for quote (RFQ) to Hydroid around 1 May.
Subsea World News - U.S. Navy Buys Another REMUS 100 UUV
Slocum Glider
Conceived by Douglas C. Webb and supported by Henry Stommel and others, the class of Slocum Gliders is named after Joshua Slocum, the first man to single-handedly sail around the world.
The Slocum Glider is a uniquely mobile network component capable of moving to specific locations and depths and occupying controlled spatial and temporal grids. Driven in a sawtooth vertical profile by variable buoyancy, the glider moves both horizontally and vertically.
The long-range and duration capabilities of Slocum gliders make them ideally suited for subsurface sampling at the regional scale. Carrying a wide variety of sensors, they can be programmed to patrol for weeks at a time, surfacing to transmit their data to shore while downloading new instructions at regular intervals, realizing a substantial cost savings compared to traditional surface ships.
The small relative cost and the ability to operate multiple vehicles with minimal personnel and infrastructure will enable small fleets of gliders to study and map the dynamic (temporal and spatial) features of subsurface coastal waters around the clock and around the calendar.
Webb Research Corporation - designs and manufacturers scientific instruments for oceanographic research and monitoring
http://www.webbresearch.com/pdf/Slocum_Glider_Data_Sheet.pdf